Как насчет того, чтобы своими руками сделать кормушку? Но кормушку не простую, а… ну в общем непростую.


Иногда случается так, что людям по каким бы то не было причинам необходимо на время уехать из своего жилища. А тем временем домашние питомцы остаются дома в ожидании возвращения своих хозяев. Но их нужно кормить, и это становится проблемой.
Мастер-самодельщик AlexGyver (YouTube канал «AlexGyver), придумал, как из доступных материалов, буквально из хозтоваров, а также из недорогих электронных компонентов с Алиэкспресс сделать крутую автоматическую кормушку, которая упростит задачу тем, кто будет иногда заходить к вам в гости и навещать ваших питомцев.
Сначала автор хотел напечатать кормушку на 3д принтере и сделать для неё свою систему управления, потому что всё, что было найдено на просторах всемирной паутины, но позже было принято решение изготовить основание кормушки из сантеха.
Делать будем кормушку с бункером, корм из которого подаётся при помощи древней технологии – винта Архимеда, или шнека, как он именуется в наше время. Конструкция планировалась примерно вот такая, что-то на подобии мясорубки:

Могут понадобиться
Набор из 12-ти стамесок для резьбы по дереву (AliExpress)
DIY набор для изготовления электронных часов (AliExpress)
Электронный ключ RC-522 для Ардуино (AliExpress)
Карбоновая пленка (AliExpress)
Но экспериментируя со шнековой подачей сухого корма, автор столкнулся с рядом проблем, которые приводили к сильному застреванию корма в конструкции такого рода. Поэтому была выбрана конструкция с открытым шнеком.
Потратив определенное количество времени на различного рода эксперименты, автор пришёл к следующим выводам:
1. Если шнек находится внутри бункера, то он обязательно должен находиться снизу в половине трубы такого же диаметра, иначе его с вероятностью 100% заклинивает от боковых кусочков.
2. Шнек обязательно должен быть ровным, иначе может произойти застревание вот такого вида.

3. Задний конец обязательно должен быть закрыт, иначе кончик шнека опять же заклинивает.
4. Если шнек однозаходный, то между его концом и выходом из бункера должно быть расстояние чуть больше, чем размер самой большой частицы корма.
5. Передний конец должен быть закреплён в радиальном направлении, иначе всё застрянет.
Для повторения данного проекта понадобится:
- коробочка из фикспрайса;
- 50-я канализационная труба;
- для изготовления шнека понадобится ПВХ трубка диаметром 7 мм и жёсткая папка для бумаги или любой другой тонкий пластик;
- Энкодер;
- Ардуино Нано;
- Китайский моторчик с редуктором;
- Драйве для управления моторчиком;
- Кнопка для управления;
- Зарядное устройство от смартфона.
Первым делом вырезаем круг диаметром 48 мм. Таких кругов нам понадобится 4 штуки.
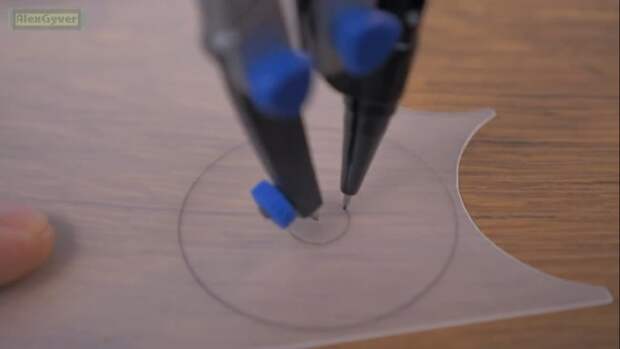
В центре получившихся деталей необходимо сделать отверстия диаметром 10 мм. Все приведенные размеры получены методом проб и ошибок.
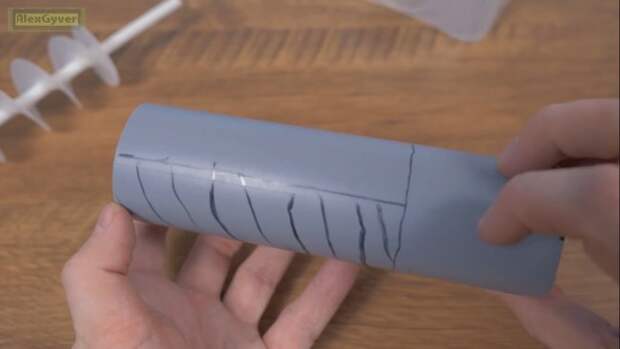
Нагреваем пластиковую заготовку при помощи зажигалки и делаем виток. Это поможет нам в дальнейшей сборке.

Клей на данном этапе использовать не будем, соединим витки при помощи степлера. В дальнейшем усилим конструкцию.
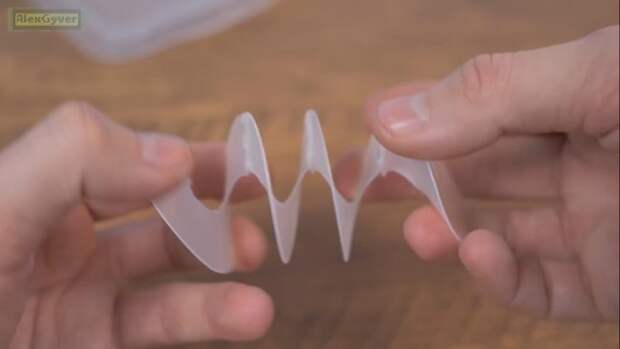
Далее зачищаем и обезжириваем поверхности, и прихватываем передний конец при помощи термоклеевого пистолета, а затем задний, предварительно натянув спираль. Клей конечно не пищевой, но, как уверяет автор, точно не токсичный.
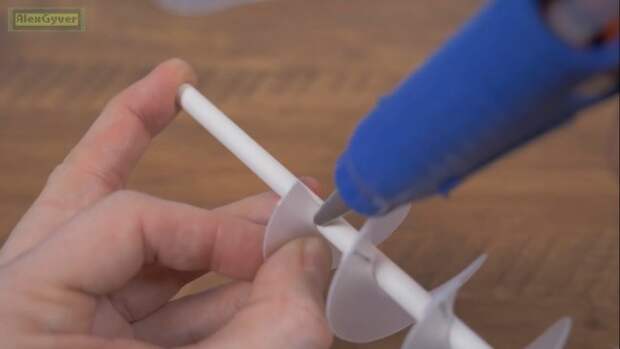
Затем вырезаем колечко чуть меньших размеров и наклеиваем сзади. Всё выравниваем и избавляемся от ступеньки на всей передней поверхности.
Все, шнек готов, далее будем работать с трубой. Из нее изготовим бункер. Первым делом в будущем бункере необходимо сделать отверстие.
Далее отступаем миллиметров 5 от края бункера и делаем следующую разметку:
Вот этот кусок нужно будет выпилить. Шнек будет приводиться в движение с помощью вот такого китайского моторчика с редуктором:

Крепить моторчик будем максимально близко к шнеку, так как в бункере довольно мало места. Аккуратно соединяем шнек с валом, слегка нагревая пластик зажигалкой.

Собственно, труба принимает форму вала. Можно ещё немного разогреть и настроить соосность.
Следующим шагом в трубе необходимо вырезать окошко под мотор.

В качестве передней опоры выступит большая скрепка.

Ну как-то так. Почти готов наш подающий механизм, а главное уже на этом этапе можно убедиться в его полной работоспособности.

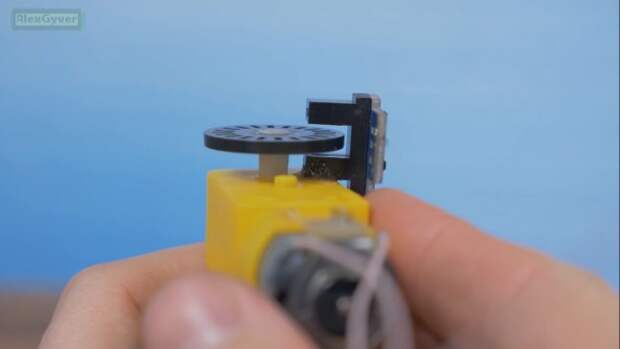
Теперь давайте перейдём к электронной части. Двухсторонний вал необходим для того, чтобы закрепить на нём энкодер.
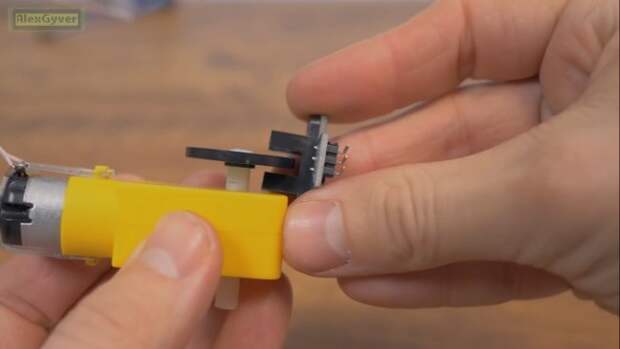
Энкодер позволит следить за поворотом вала, то есть шнека, что позволит весьма точно дозировать порции корма. Также это позволит следить за скоростью поворота вала и поднимать напряжение на мотор, если нагрузка на шнек большая и обороты проседают. Таким образом мы получаем защиту от заклинивания механизма, а именно это больше всего пугает в автоматической кормушке.
Управлять всей системой будет платформа Ардуино Нано.
Для управления мотором понадобится драйвер. В принципе вполне можно обойтись и транзистором, но для одного довольно интересного режима нам понадобится крутить мотор в обратную сторону, а для этого уже нужен драйвер.
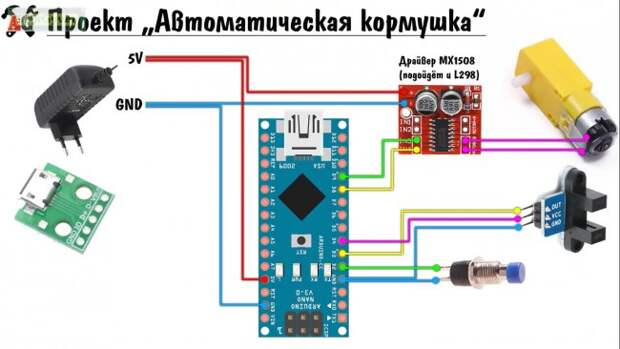
Схема подключения выглядит вот так:
Приступаем к сборке. Энкодер крепим на суперклей. Можно усилить суперклеем с содой. С помощью хомута надёжно фиксируем мотор.

Соединяем электронные компоненты проводами и крепим на трубе.

Далее подключаем Ардуино к компьютеру, переходим на страницу проекта и качаем прошивку.
Затем открываем файл прошивки, и смотрим настройки. Подробнее смотрите в оригинальном видеоролике автора:
После установки настроек жмём кнопочку «загрузить» и код загружается в микроконтроллер.
Всё окончательно крепим и проделываем необходимые отверстия под mini USB для загрузки и micro USB для питания. Питать схему в mini USB Arduino нельзя, потому что мотор может потребовать до 800 мА под нагрузкой и на плате вылетит предохранитель.

Добавляем откосы, чтобы корм вырабатывался полностью.


Теперь о том, как это работает. У нас есть кнопка. Если кликнуть по ней – система пропустит время ожидания и выдаст порцию корма. Следующая кормёжка автоматически произойдёт через установленное время и далее по кругу.


Чтобы настроить размер порции, нажимаем и удерживаем кнопку. Удерживаем до тех пор, пока не наберётся нужный объём корма. После отпускания кнопки таймер будет сброшен, а установленный размер порции запишется в память и не будет сбрасываться при перезагрузке.


Как уже было сказано выше, система способна сама управлять напряжением на моторе в зависимости от скорости вращения, и, если нагрузка вдруг возрастает – на мотор подаётся большая мощность и подача корма продолжается. Так же в проекте предусмотрен режим устранения заклинивания. Если система понимает, что мощность на мотор подаётся уже максимальная, но шнек стоит на месте – значит его полностью заклинило. Система делает кратковременный (время можно настроить в прошивке) рывок шнеком в обратную сторону, а затем продолжает насыпание корма.
На этом все. Благодарю за внимание.
Свежие комментарии